
污水處理過程PLC模糊控制器的設計與應用
3 plc模糊控制器的優化設計
3.1 應用背景
實際上,工業污水中有機物的濃度隨時間而變化,若呆板地按照固定的時間來控制sbr污水處理系統的運行,既浪費能源又易發生污泥膨脹,而且若時間設置不當還將影響處理效果。
近年來,由于模糊控制學科的迅速發展,已有大量將模糊邏輯控制技術應用于工業自動化、機器人控制以及智能儀表和家用電器領域的實例。模糊控制器是一種基于模糊控制規則的控制器,而這種模糊規則就是人們對實際受控制過程的歸納以及經驗的總結。
目前,許多污水處理工廠在實際應用中還不能實時檢測各種污水指標,只是采用時間程序控制,所以影響了控制效果以及污水處理能力。然而由于市場上化學需氧量cod濃度在線檢測儀的出現,我們可以將cod濃度作為重要的工藝參數,組成基于plc的sbr污水處理模糊控制系統。
3.2 plc模糊控制器的優點
由于sbr法污水處理系統本身是一個復雜的動態系統,其數學模型難以精確確定。化學需氧量cod是一個重要的參數,其在線檢測有一定的滯后。基于plc的模糊控制方案不需要確定控制對象精確的數學模型,而是根據控制規則決定控制量的大小,這種方法可以使這個反應過程的cod處于合適的范圍。這樣,系統就可以通過在線檢測cod的濃度值來調節曝氣量,以保證出水質量,節省運行費用。
4 plc模糊控制器的設計
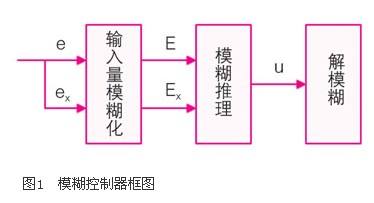
模糊控制器包括輸入量模糊化、模糊推理和解模糊三部分。e和ex分別為e和ex模糊化后的模糊量,u為模糊控制量,u為u解模糊化后的精確量。
曝氣裝置模糊控制器的輸入量為曝氣池中cod達標值與測量值的誤差e及誤差變化率ex,輸出量為曝氣機曝氣增量u,其框圖如圖1所示。控制器定時采樣cod值和cod值變化率,并與達標值比較,以此得出cod值誤差e及誤差變化率ex,并以此作為plc控制器的輸入變量,這樣模糊控制器的輸出就可控制曝氣機閥門的開度了。
4.1 輸入模糊化
在模糊控制器設計中,設e的詞集為[nb,nm,ns,zo,ps,pm,pb],論域為[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6];ex和u的詞集為[nb,ns,zo,ps,pb],論域為[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6];e(k)=cod(k)-cod0,cod(k)=e(k)-e(k-1),其中cod0表示達標值。
先將e,ex和u模糊化,再根據cod值的控制經驗可得變量e,ex和u的模糊量化表。由于篇幅所限,變量e,ex和u的賦值表予以省略。
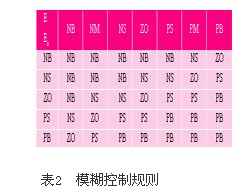
4.2 模糊控制規則
通過總結污水處理過程中cod手動控制經驗,得出模糊控制規則,如表2所示。
根據控制規則表,可得到35條模糊控制規則。舉例如下:
● 當cod誤差和誤差變化均為負大時,cod值小于達標值cod0,應減少曝氣量,所以u取nb,曝氣機全關;即控制規則為if
e=nb and ex=nb then u=nb;
● 當cod誤差是負大,誤差變化為正大時,曝氣機開度不變;即控制規則為if e=nb and ex=pb then u=zo。








